

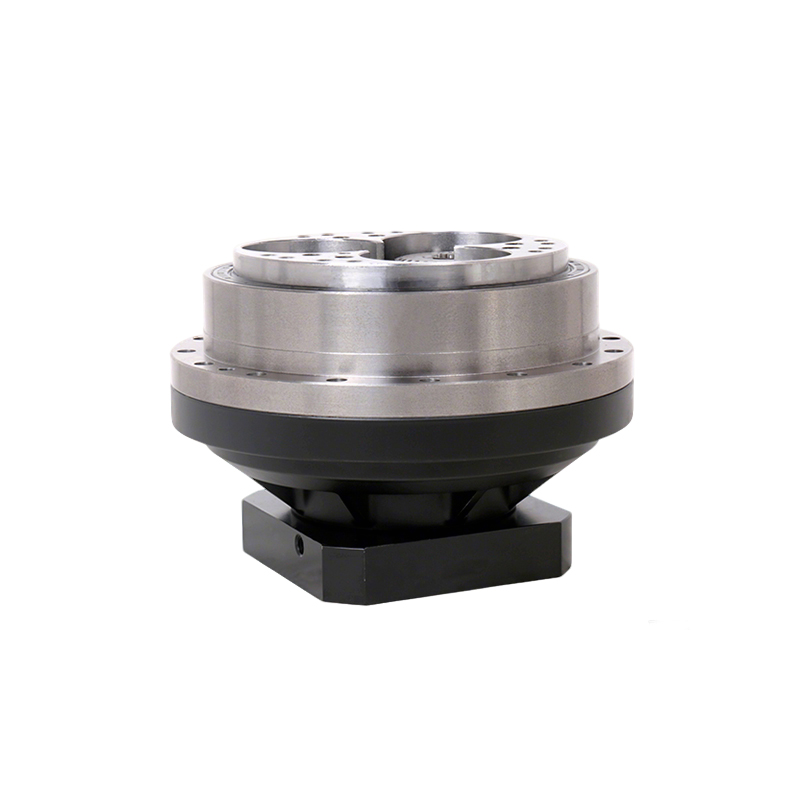


PEEK-roboten för RV-reducerare är en högprecisionsreducerare som applicerar PEEK-kompositmaterial (polyeter-eterketon) på RV-transmissionsstrukturen (roterande vektor), och integrerar den höga styvheten hos RV-reducerare med PEEK-materialens lättviktsfördel. Följande är en introduktion utifrån aspekter av strukturell innovation, materialegenskaper, prestandaindikatorer och tillämpningsscenarier:
I. Strukturell innovation
Den använder en tvåstegs reduktionsstruktur: det första steget är planetväxelreduktion (solväxel + 3 planetväxlar), och det andra steget är cykloidal pinnhjulreduktion (2 cykloidala hjul med en fasskillnad på 180°). I kärntransmissionskomponenterna är cykloidalhjulen tillverkade av 30 % kolfiberförstärkt PEEK-formsprutning, tapparna är PEEK-metallkompositstrukturer (PEEK-slitstarkt lager på utsidan + stålkärnaxel), och det excentriska axellagerhuset integrerar PEEK-självsmörjande bussningar, vilket möjliggör långvarig drift utan olja. Den övergripande strukturen är optimerad genom finita elementtopologi, vilket minskar antalet delar med 25 % jämfört med traditionella RV-reducerare i stål.

II. Materialegenskaper
Fördel med förhållandet mellan hållfasthet och vikt: Draghållfastheten hos PEEK-cykloidhjulet når 180 MPa, med en densitet på endast 1,45 g/cm³, vilket minskar vikten med 55 % jämfört med cykloidhjul av stål. Samtidigt ökar tandrotens böjhållfasthet med 40 % genom kolfiberorienterad design.
Dynamisk prestanda: Materialets dämpningskoefficient är 0,02 (0,001 för stål), vilket minskar transmissionsbuller med 15–20 dB och ökar resonansfrekvensen till över 3000 Hz.
Miljöanpassningsförmåga: Den bibehåller stabila mekaniska egenskaper inom temperaturområdet -60 °C till 220 °C, är motståndskraftig mot hydraulolja och växellådsolja och uppfyller skyddsnivåkraven IP67.

III. Kärnprestandaindikatorer
Transmissionsnoggrannhet: Glapp ≤ 15 bågsekunder, repeterbar positioneringsnoggrannhet ±5 bågsekunder, momentfluktuation vid start utan belastning ≤ 3 %.
Belastningskapacitet: Nominellt utgångsmoment 80–300 Nm (motsvarande modeller RV-40 till RV-110), kortvarig överbelastningsfaktor 2,5 gånger.
Verkningsgrad och livslängd: Transmissionsverkningsgrad 94–96 % (vid 2000 rpm ingångsvarvtal), MTBF (medeltid mellan fel) > 20 000 timmar (under nominella förhållanden).
IV. Typiska tillämpningsscenarier
Humanoida robotar: Delar med hög belastning, såsom midjeleder och knäleder, såsom höftledsdrivenheten på Tesla Optimus (kräver reducerare av klass 200 Nm).
Industrirobotar: J2/J3-axlar med sexaxliga mekaniska armar, som ersätter traditionella harmoniska reducerare för att uppnå högre styvhet.
Avancerad utrustning: Robotar för hantering av halvledarskivor, kirurgiska robotändeffektorer, som samtidigt måste uppfylla krav på lättvikt och positioneringsnoggrannhet på mikronnivå.









